Чем еще заняться в выходной, чтобы занять мозг и руки? У меня всегда есть что спаять )) Сегодня решил сделать 2 апргэйда своей аппаратуре управления FrSky HORUS x10.
1. Заменить инвертор.
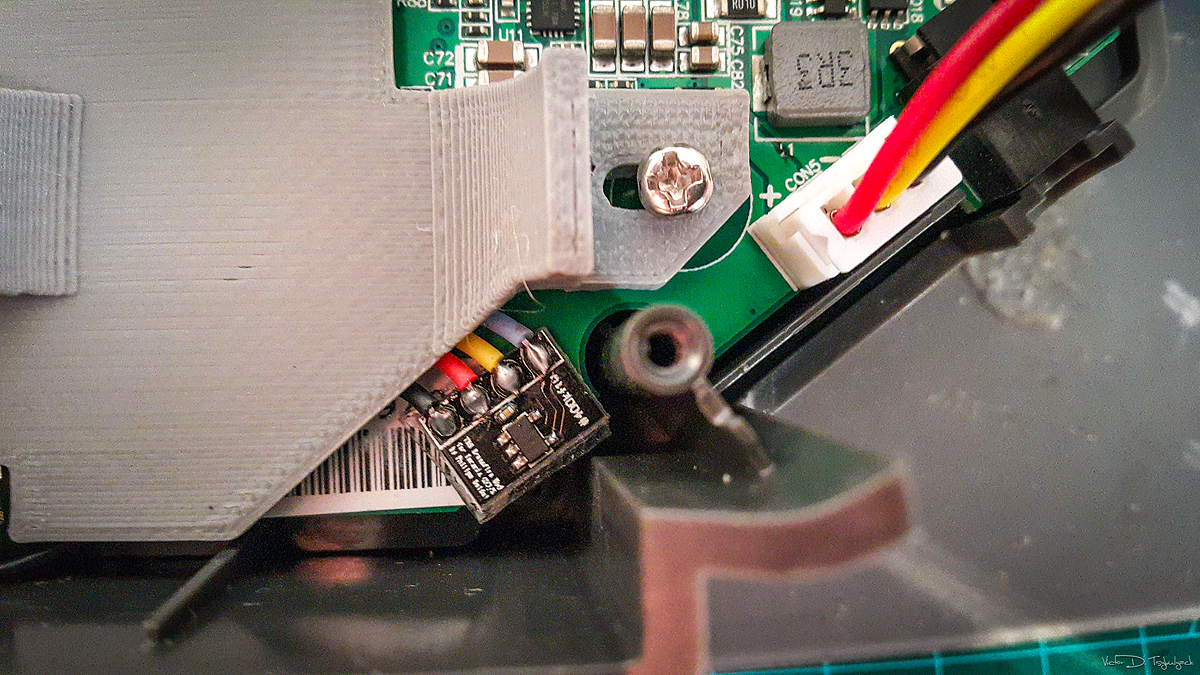
Те кто пользует Crossfire от TBS, в курсе про то что телеметрия на 400kbps у новых аппаратур FrSky не работает с Кроссфайром. Ну можно смириться с 115kbps, ибо оно более чем достаточно, но разве не хочется чтобы все работало как должно?
Чтоб два раза не вставать, и не вскрывать попусту аппу, решил заапргэйдить аккум в аппе. Стоковая 2S Li-ion на 2600 mAh несколько мелковата, и я решил сделать 2S2P на 6700 mAh. Для чего заказал 4 шутки Panasonic NCR18650B по 3350 mAh каждая и собрал баттарею. Контроллер заряда взял со штатного аккума. Единственное, контроллер может не завестись после перепайки, и показывать на выходе 0V. Для его ресета, надо закоротить площадки «B-» и «P-». После этого все пучком.
Кстати, очень легко и просто паять банки 18650 флюсом для алюминия и 60Вт паяльником. Просто секундное дело приклепать провод на банку и не перегреть.
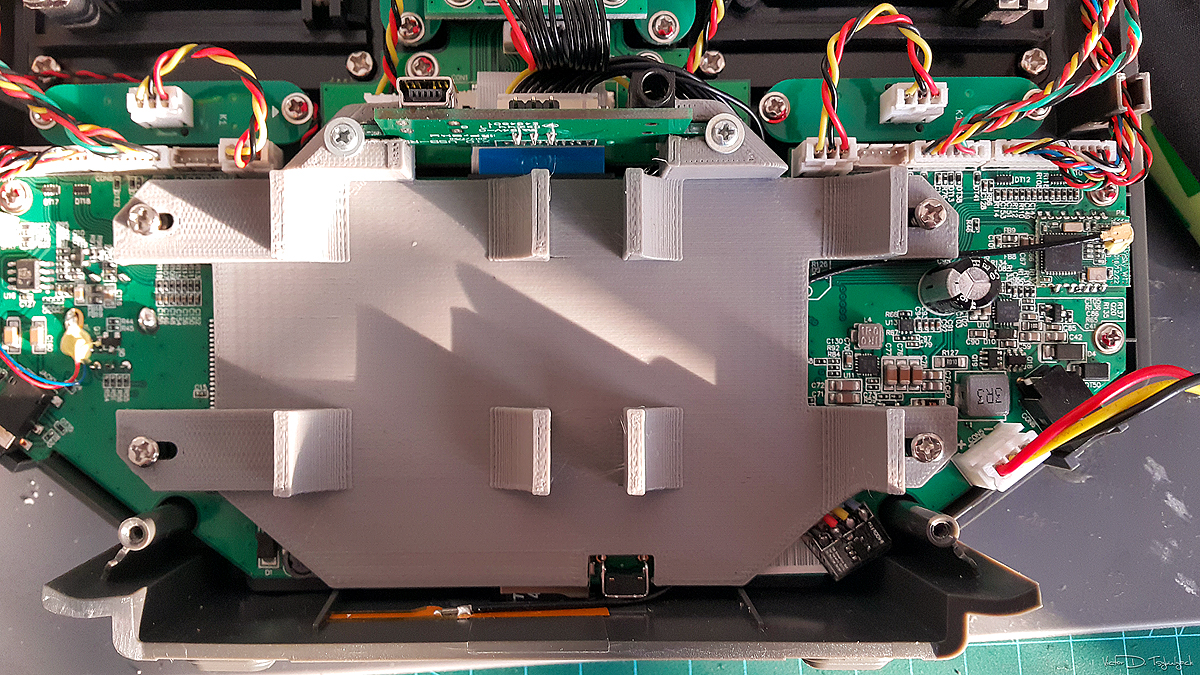
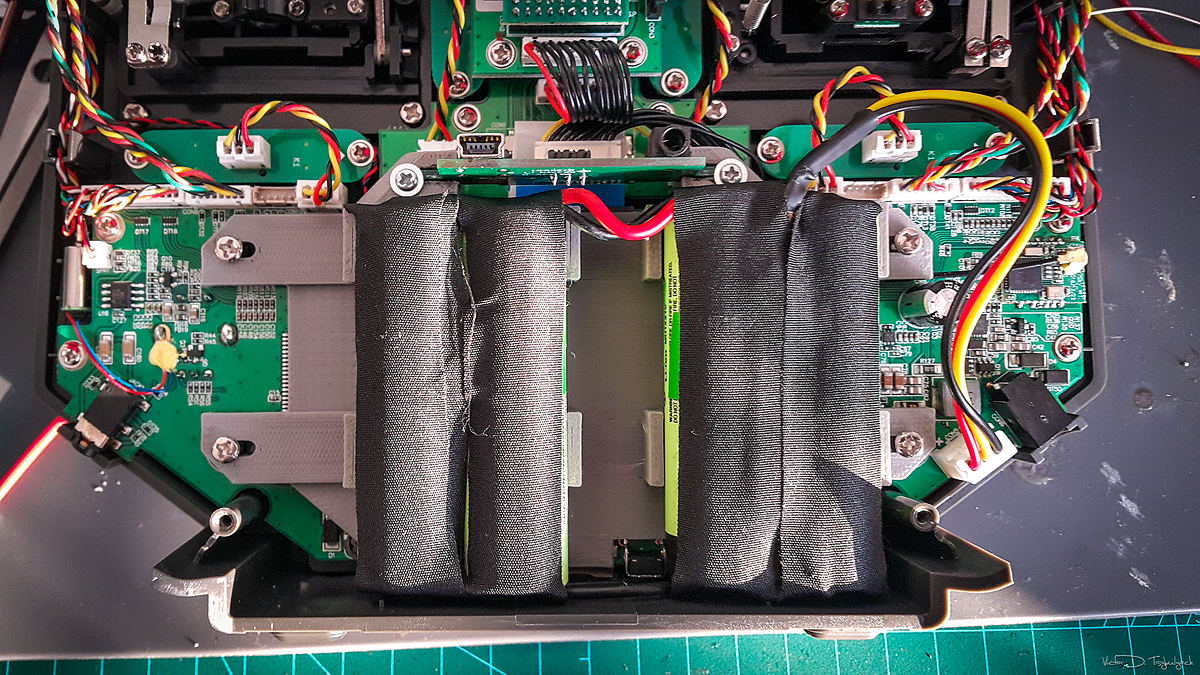
Площадку для крепления 4х аккумов нашел на Thingiverse.com и благодаря старым друзьям, распечатал на 3Д-принтере. Получилось вполне так неплохо:
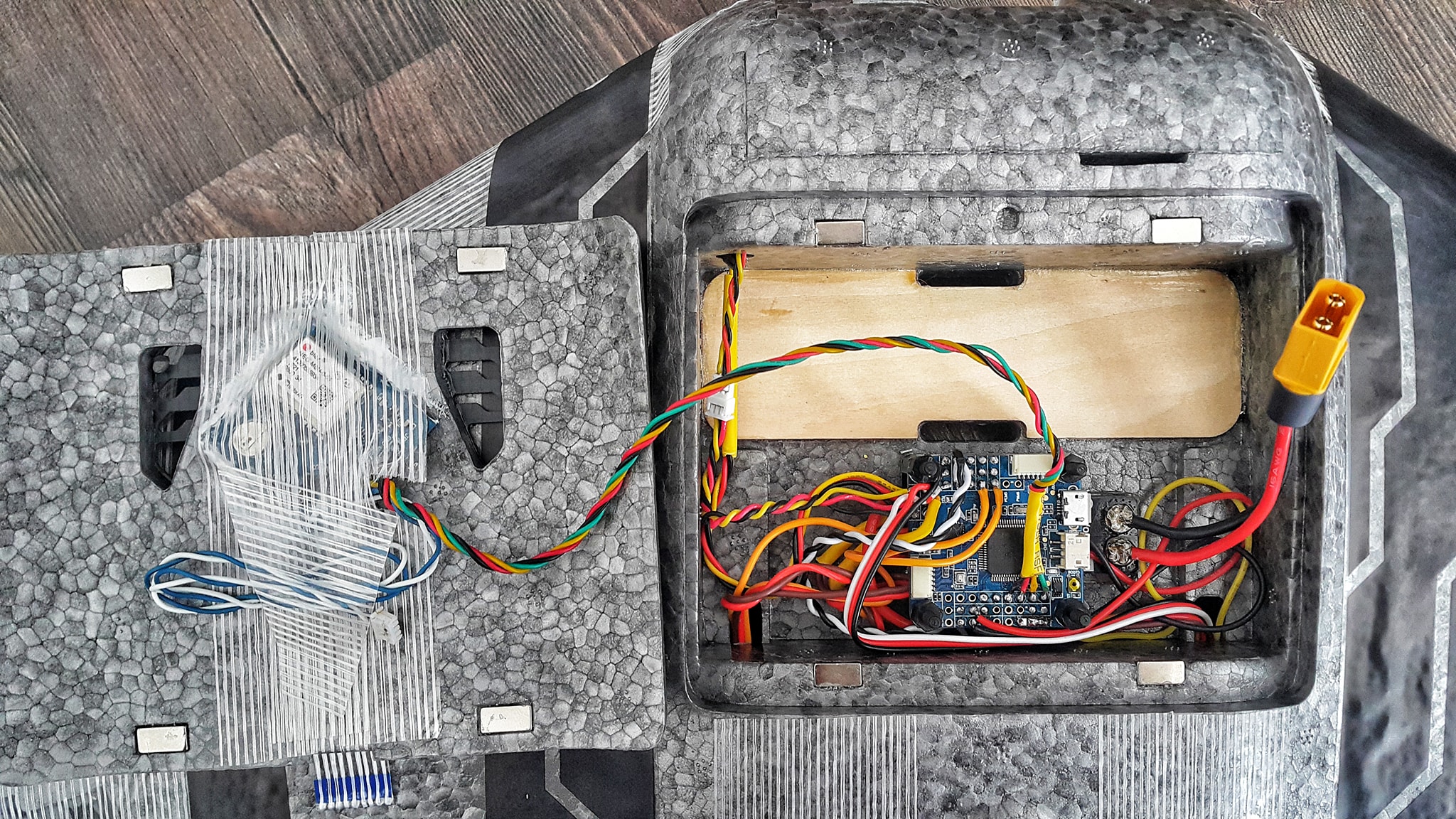
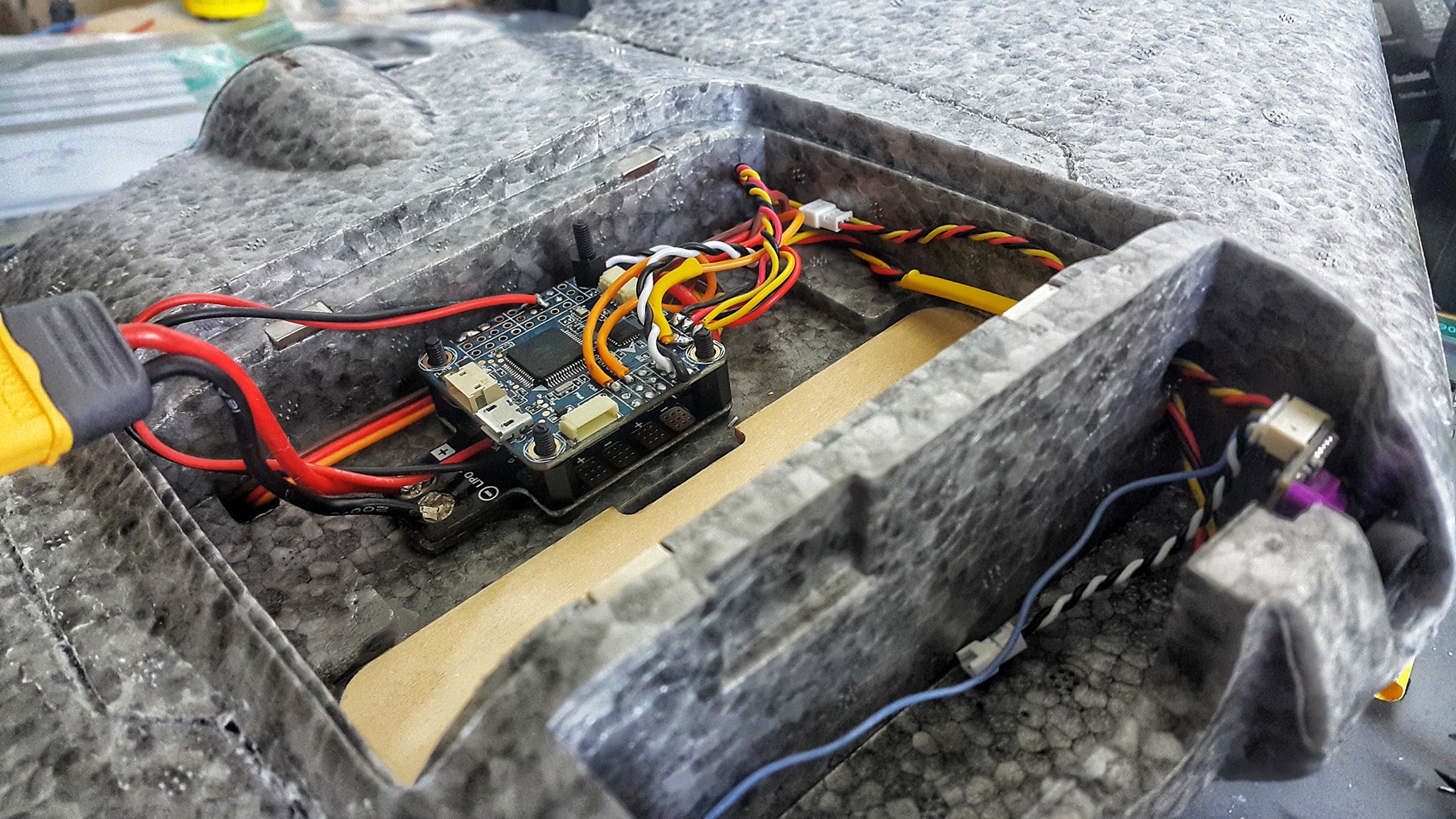
«Рептилия» собрана. Конечно я захотел чтобы она была умная, посему решил поставить мозг — Omnibus F4 pro v3, вторым этажом, над PDB от Matek, что валялись у меня без дела GPS — пока с неподключенным компасом, ибо айнав умеет понимать куда поворачивать и без него, а то калибровать компас рядом с магнитами крышки — тот еще цирк был бы. Камера — давно валялась Runcam Micro Sparrow 2, ибо та что шла в комплекте с рептилией — фигня полная. Видеопередатчик — хз какой))) что был в коробке. Фигня какая-то, но мне для первых полетов — сойдет. Всеравно эту зверушку пока не планирую отпускать вдаль. Приемник РУ — Frsky XSR+. Осталось настроить iNav и скрестив пальцы, запустить зверушку в небо.
Немного страшновато... с коптерами — привычно, если не умеешь удерживать в акро — включаешь position hold и он висит. А эта зверушка, если полетит, стоять на месте не будет... видимо надо бы с ДДТ-шниками пойти и попросить пару уроков управления самолетом)))... да и я немного перестраховался — управление рептилией будет контролировать все-таки iNav. Со всеми плюшками вроде «помошника запуска — autolaunch» и RTL (возврат домой)... так что все может быть не так уж страшно... наверное))))
Ну что-ж, не прошло и года, как квадрокоптер с бортовым номером XSQD-001 (Роджик aka Jolly Rogers) обрел новую семью в Бельцком Доме Детского Творчества. Полагаю ему найдут местечко, хоть «сундук» у него не маленький, но зато полный всякими полезными ништяками что я им положил в довесок, как аккумуляторы, зарядки, приемники и передатчики телеметрии и видео и хорошую аппу управления — Frsky Taranis.
К сожалению сегодня было не много народа, но ребята обещали позвать на следующие полетушки в большем составе, тем более что им уже есть что изучать в чуть новом для них увлечении.
Вместе с Игорем Афатиным — руководителем кружка авиамоделирования, при ДДТ, и одним из учеников Владом Прианом, и таким же энтузиастом моделирования Алексеем, полетали на аэродроме. Они — на своих самолетах, я — на «Роджик»-е, который, надо сказать взлетел после простоя в два года(!!) без малейших проблем и показал свое солидное четырехмоторное урчание больших пропеллеров.
Приятно находится в обществе увлеченных небом и конструированием людей! С радостью буду иногда навещать их полетушки. Хороший день!
Раз у меня уже есть такое неизлечимое хобби, как конструирование дронов, нельзя дать ему пропасть, правда? А поскольку на профильных форумах тема мелких долголётов/дальнолётов очень активно обсуждается и соотвественно появились интересные моторы/пропеллеры, решил и я «не отставать от трендов» =))
В конце поста я дам список комплектующих, для желающих сделать нечто подобное, или просто чтобы ориентироваться и иметь точку отсчета, если захочется собрать своё собственное, а пока расскажу что и почему я выбрал.
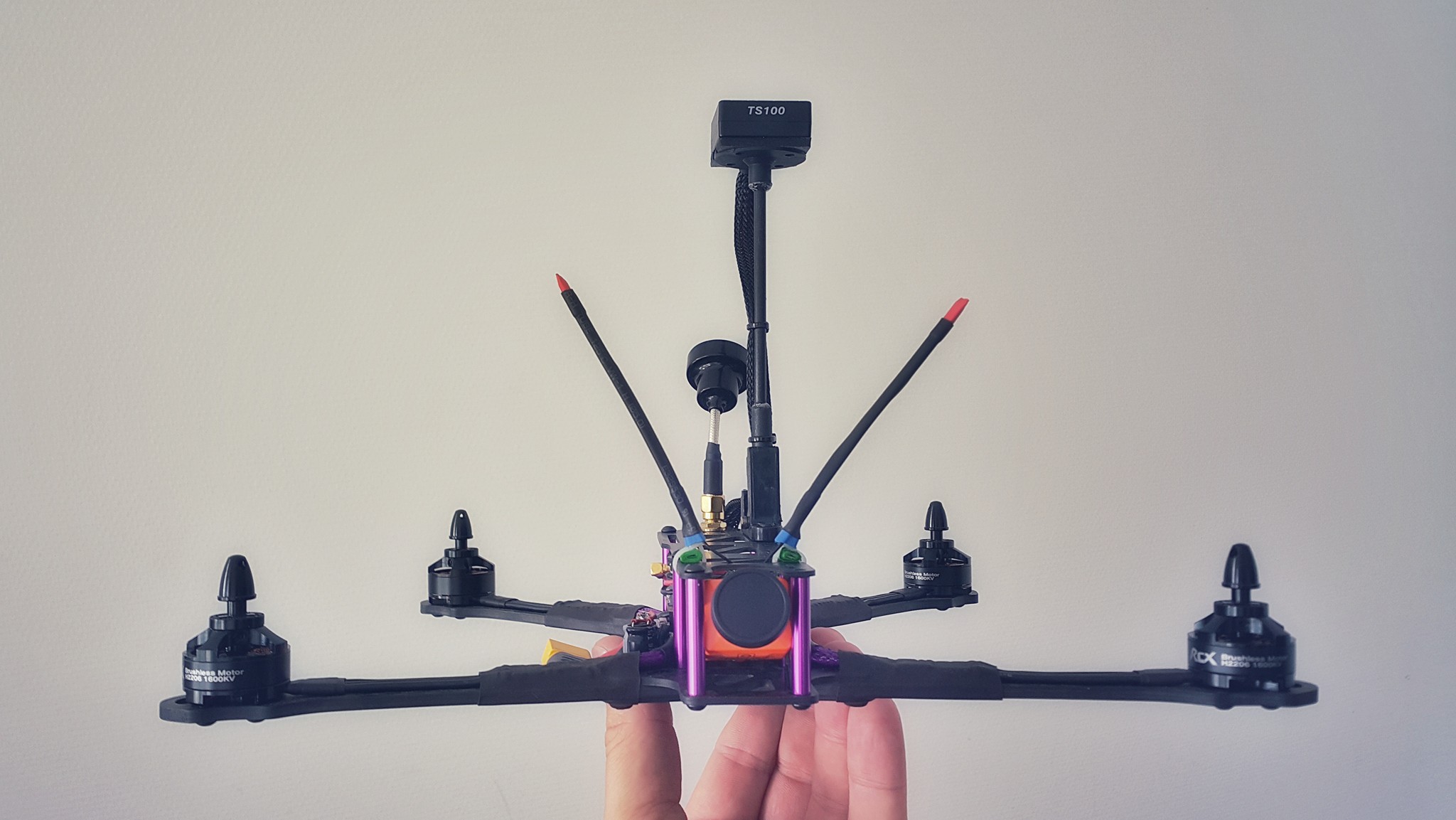
Раму выбирал такую, чтобы пишущая камера не ловила в кадре пропеллеры, и с этим делом все грустно – почти все рамы размера 7” имеют форму обычного Х. Но, кто ищет тот находит. Клевые ребята АлександрFPV и AnikFPV разработали очень клевую раму — Strizh 7LR (есть и 8LR – под 8” пропы) Эта форма рамы называется «deadcat» аки дохлыйкот)) что в купе с официальным именем Стриж обозначилась у меня как «Котостриж», в общем, так и будем называть зверька.
Рамка собралась быстро, на лучи удобно легли регуляторы (ESC), которые я заклеил толстым двухстронним скотчем к лучам и затянул в термоусадку. Провода силовые я тоже спрятал в плетёнку под цвет стоек.
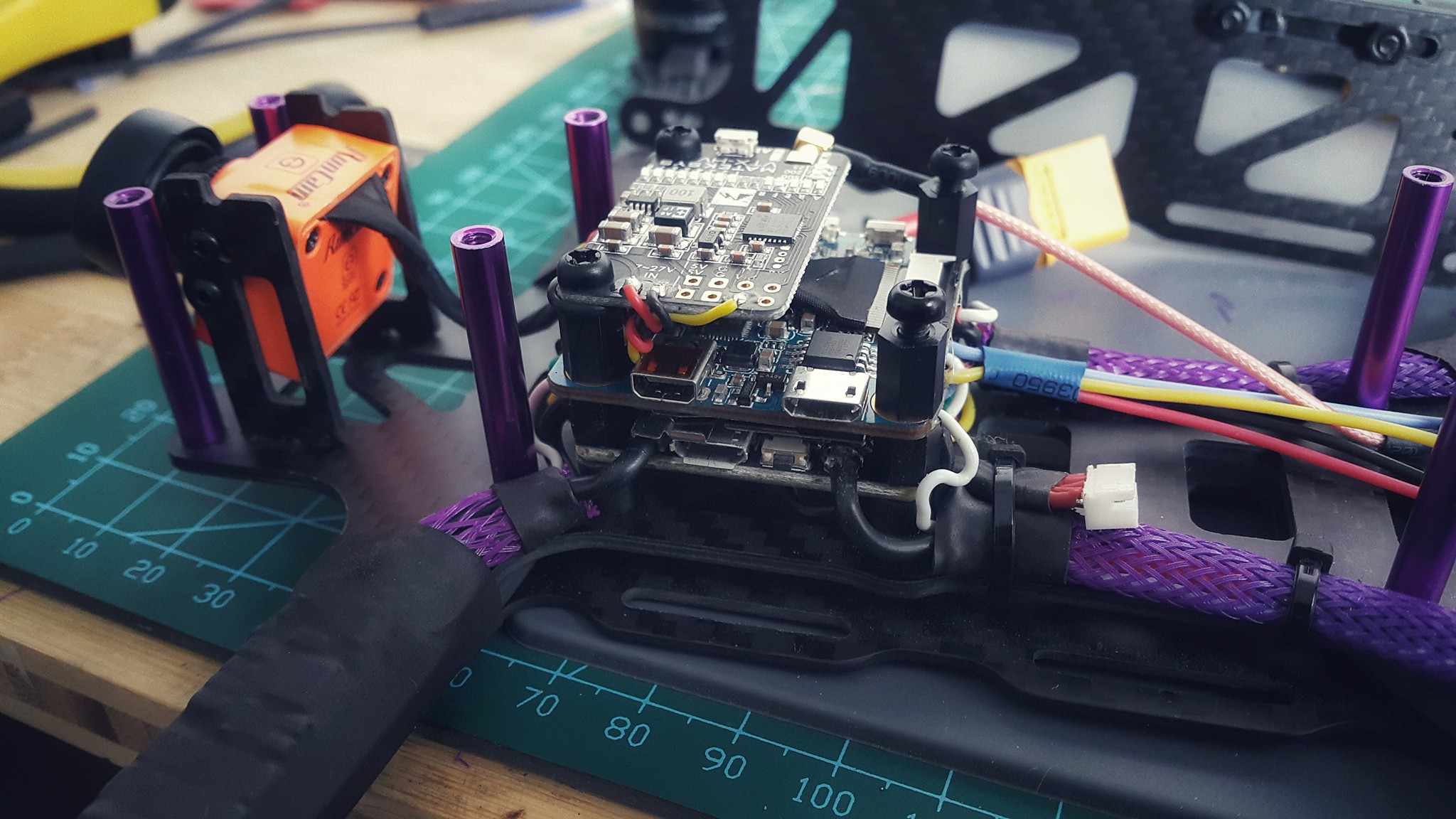
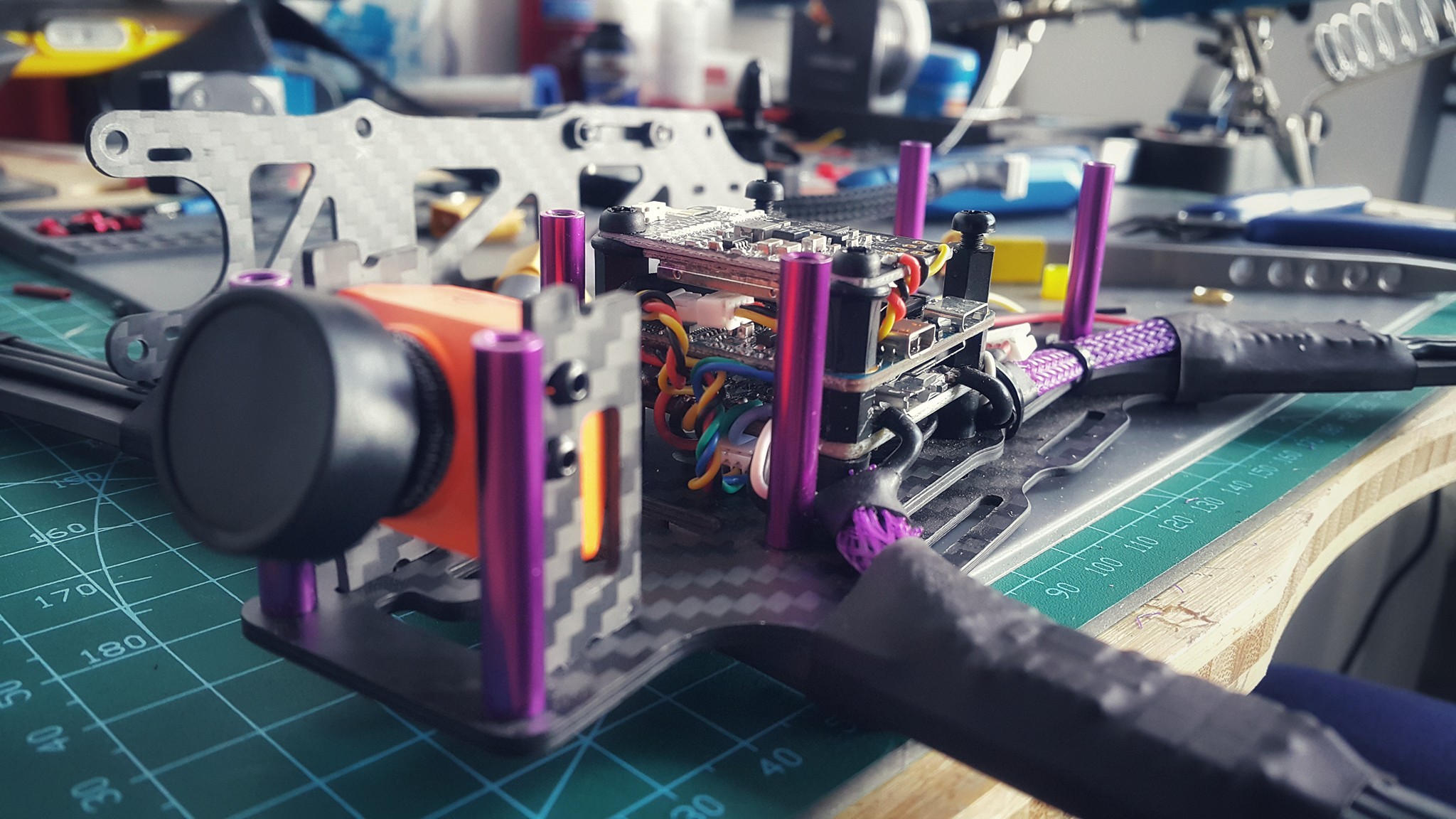
Полётный контроллер (аки «мозг») я использовал очень популярный и сразу мне понравившийся — Matek F405-CTR, дофига портов(чтобы хватило и на GPS и на телеметрию, и управлять камерой, итд…), все хорошо документировано, а также у самого производителя есть своя сборка iNav под него. Очень удобно.
Камеру я выбрал Runcam Split 2, из-за того что она и пишет на флешку FullHD в 60fps и передает аналоговый сигнал полетнику для наложения OSD и отправки на землю. Ну и маленькая она.
Верхним этажом на чуть удлиненных стойках разместился передатчик от Matek, ибо греется неслабо при работе даже не на полной мощности.
Межблочные соединения сделал на мелких разъемчиках micro JST, чтобы иметь возможность менять их при необходимости между дронами, без излишней пайки.
Долгожданный момент... и….
… «Котостриж» вещает в прямом эфире на 5,8ГГц и пол-ватта мощности =) Аналоговым сигналом, но вполне так достойным по качеству!
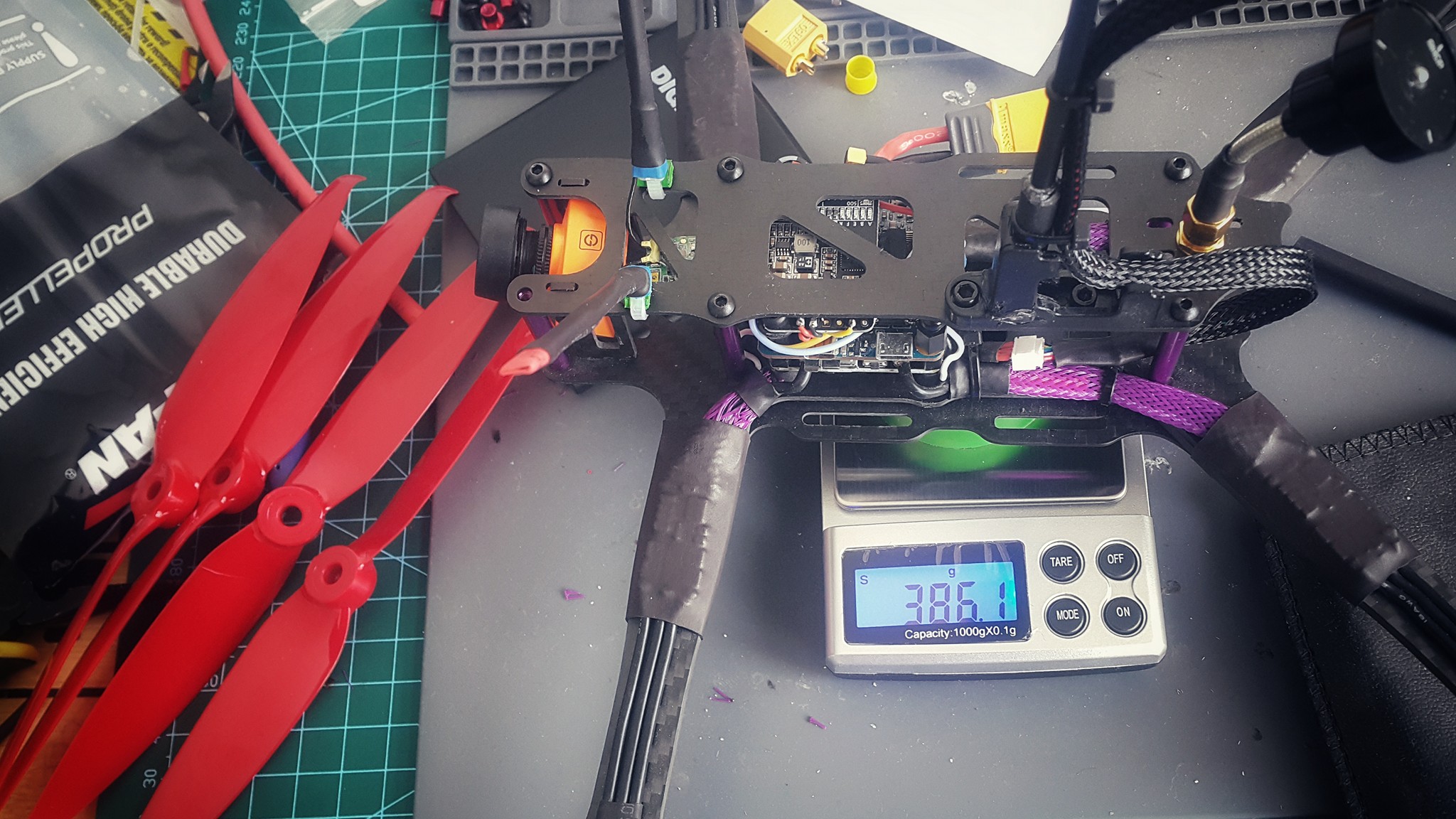
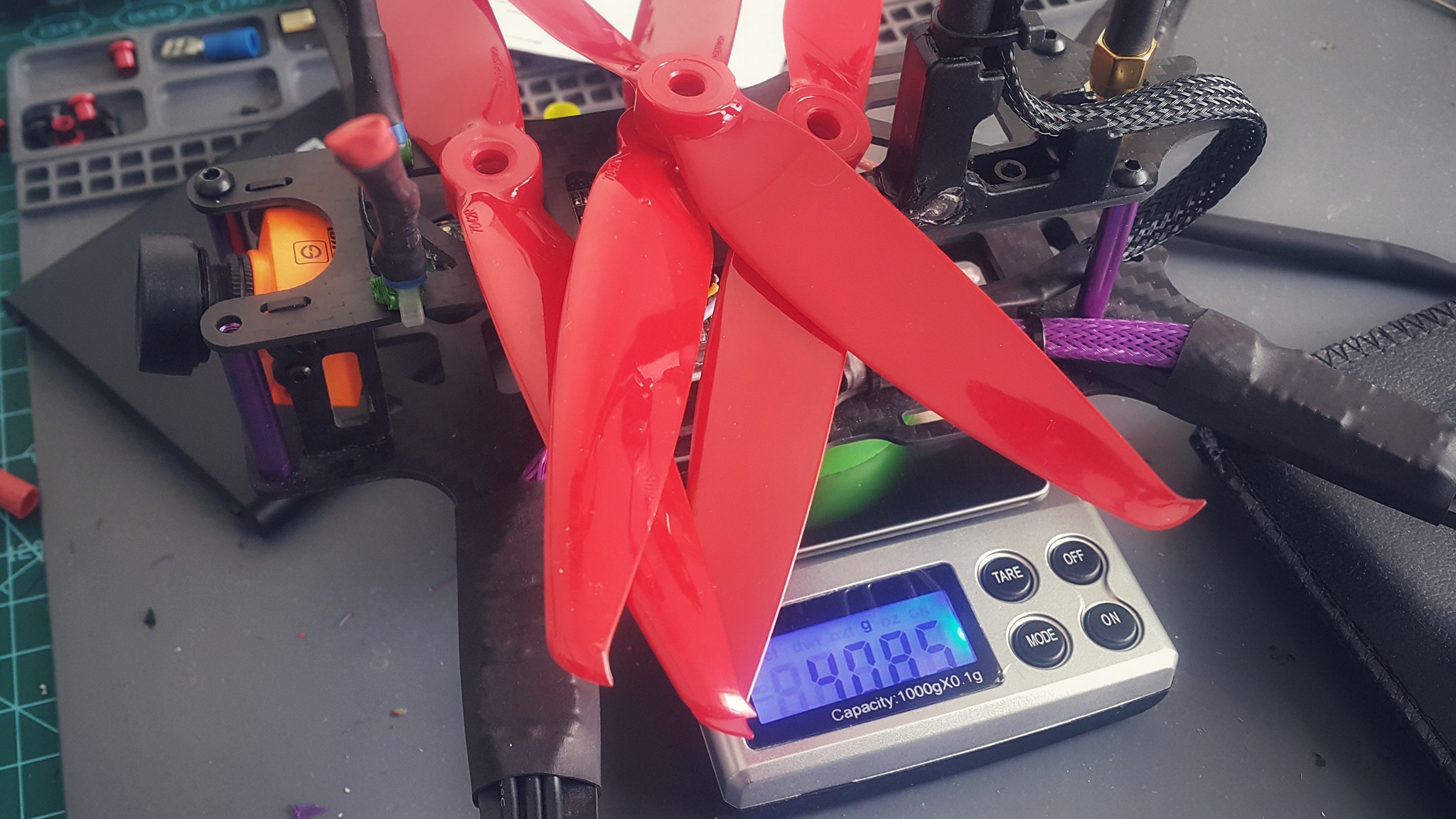
Собранный полностью без пропеллеров, вестит 386 грамм!
А с пропами – 408 грамм, что конечно, не рекорд, но вполне так достойно!
Обещанный список комплектующих:
Рама – Strizh 7LR v1.1 – Выпиливается на заказ и заказывается — здесь https://goo.gl/3qUWgq
Я так пока и не передал большой квадрокоптер Дому Детского Творчества в Бельцах — ждем хорошую погоду, чтобы показать подрастающему поколению как зверек летает...
... и пока ковырялся в своих запасах электронного барахла с мыслями что еще докинуть ребятам, понял что «болезнь»- вернулась =)) Правда приступов гигантомании больше не было, большая и тяжелая гекса так и лежит в кейсе дома, а вот сделать что-то мелкое но говнистое — руки зачесались. Да так зачесались что полез на старые-добрые hobbyking и banggood и мгновенно оставил там кусок зарплаты ))) ладно вру, не мгновенно, уже неделю-две как копаюсь в ecalc.ch с подбором параметров и компонентов, а также на своих любимых авиа/коптеро-модельных форумах. Кстати ютуб хорош нынче для поиска отзывов по моторчикам/контроллерам...
С одной стороны — это все хорошо, но... по ходу, таки не лечится. ))))
Мне тут скинули ссылку на Тему, который продает гексу... Ну что сказать, респект и уважуха... за 11 тыс баксов пытаться запулить — это сильно. А если запулит — то безусловно таллант!
Рама, как и взятая за основу у меня — Tarot X6. Моторы не вижу, но пускай Т-Мотор, как самые лучшие, ну НАЗА, ну лайтбридж... ну не тянет это на 11 килобаксов... даже близко. Разве что подвесил бы какой-то RED внизу... новый... тогда может быть, но так — забавно.
Я тут подумал раз пошла такая пьянка, может продать и свои и КВАДрокоптер, и ГЕКСАкоптер (такой же как у темы) даже вместе и дешевле чем хочет Тема вполовину ))))))
Вот и полетел звереныш по просторам Молдовы. В Бельцах он точно первый, а в Молдове, полагаю что точно среди первых, ибо DJI с выпуском этого дрона получила такой вал заказов, что бэклог был очень большим. Этот был заказан в начале ноября, а в руки он мне попал под конец января... но ЭТО СТОИЛО ТОГО!
То, что DJI засунула в этот маленький, но дерзкий дрон, столько технологий, мне как увлекающимся постройкой собственых дронов, внушает безмерное уважение. И он реально КОМПАКТНЫЙ! и СТАБИЛЬНЫЙ! и снимает 4К! ...и просто КЛЕВЫЙ! )))
Я восторгаюсь им чуть больше недели и кажется не перестану удивляться, насколько все-же круты эти перцы из DJI...
Что самое забавное, что первые полеты (с видео), певого, собранного мной, коптера были ровненько год назад )))
Это мое первое, смонтированное мной же в Премьере, которое я открыл хорошо если в третий раз в жизни ))) Снято же, конечно, на Блэкмэджик, специально обученными профессионалами ))) И да, никакого цветокора, итд... просто нарезка. Энджой!
Разбор полетов:
Больше месяца назад, 15 октября, был намечен запуск звереныша в небо... День выдался дождливым и даже ветренным, но аккумы были уже заряжены, а гекса слишком долго ждала в низком старте первого полета чтобы это нас остановило.
В общем, выбрали площадочку за городом, где не слишком лил дождь и выгрузились... После шаманских плясок с бубном (калибровки компаса), гекса взлетела! Ровно, четко, и плавно. То, что я поднял её в стэйбилаз а не в лойтер, это я конечно смелый... но глупый ) ибо ветерок все-же был нормальным и гексу унесло... сначала мой мозг среагировал газом, чтобы не зацепить что-то на земле, а потом дошло что, может следует воспользоваться GPS… раз уже его туда установил... чайник блин )))
Переключившись и вернув гексу в удобное поле зрения получили первый сюрприз – карбоновый колпак, который держался как на квадрике на резинках, тут имеет площать раза в 4 большую... и такую же парусность, поэтому что?.. правильно, его сорвало... при чем хорошо ударило пропеллерами... Вывод №1 – колпак надо крепить по-человечески.
Но стабильность самой гексы, при этом порадовала – pixHawk (PixRaptor) отработал на отлично! (при чем, слетал колпак на самом деле — дважды, мы-то не сразу до вывода №1 дошли – и второй раз было еще жестче и ближе от земли – но всеравно скомпенсировалась она четко. При том что оба раза срывало со стойки блок GPS в котором находится и основной компас, но мозг и это отработал суперчетко – использовав при диких расхождениях, второй компас, встроенный в PixRaptor. Матерился он при этом знатно, по телеметрии, но отработал на 100 баллов. В отличии от меня )))
Вторая вишня на тортике оказалась тоже хорошим тестом – из-за аварийных посадок и ударов о колпак, повредило быстросъемное крепление одного пропеллера, да так что при попытке контрольного взлета – крепление расколбасило окончательно (он резко взял вперед, но скомпенсировался сам) и проп, при посадке просто вылетел...
Насыщенный получился первый полет, но мне, если честно, очень понравилось как она себя ведет в сразу двух экстремальных ситуациях. (с квадом таких нештатных ситуевин не было ни разу)
Как на самом деле происходил первый взлет гексы:
(чтобы у вас не сложилось впечатление, что все прям так плохо, из-за первого видео в котором я собрал фэйлы — на память, видео вообще без редактирования)
Теперь жду хоть немного спокойной погоды на выходных чтобы опять запустить зверька в небо. Теперь будем добиваться стабильной картинки с подвешенной под брюхом Соньки... Следите за рекламой 😉
PS: Спасибо Кате за поддержку, съемку и вообще за свое безусловно приятное присутствие 😉
Небольшой апдэйтик... примерно так смотрится зацепленнный к дрону подвес, сбалансированный с установленной SONY A6000 выбранной в качестве бортовой камеры.
А я тем временем, почти собрал все 6 лучей для монтажа двигателей, ESC были выбранны — Hobbywing XRotor на 40A чтобы помещались внутри карбоновых трубок лучей. Проводочку ессно сделал как надо, чтоб даж самому нравилось.
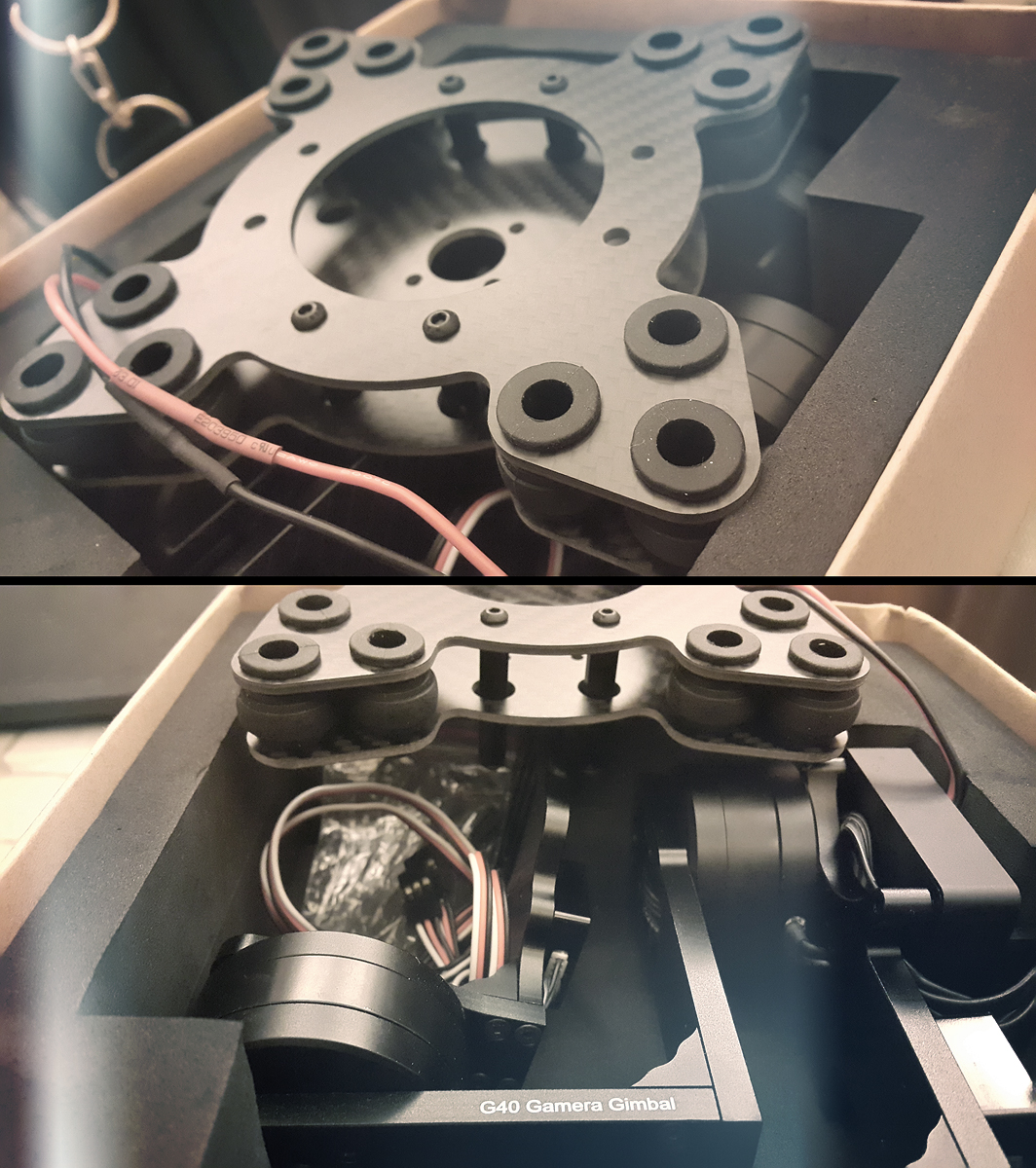
Приехала такая миленькая деталька для гексы... очень и очень радуют китайцы все возрастающим качеством. Так и чешутся руки завести и проверить как работает, но жду еще предмет подвеса 😉
Рассказ про то, как непривычно хорошо и правильно бывает что работают магазины и их саппорт... и про то что Китай... он сильно разный. На этот раз просто нереально позитивный опыт работы с ними.
Приехали заказанные с моего любимого ХоббиКинга, моторки для гексы. Выбор пал на Multistar Elite 5010-274KV, который под хоббикинговским брендом Turnigy, являются на самом деле, топовыми ARRIS. Но это мало кому что говорит, скажу тольно что с наклейкой ARRIS они почти в два раза дороже, несмотря на то что и так, они не самые дешевые.
Но суть не в этом. Распаковал и досадливо хмыкнул — в одном комплекте не хватало крепежа для пропеллера — шайбочки с двумя винтами. Как бы не страшно и решаемо, но решил все-же написать в суппорт. Выслал им фотку и спросил чо делать?
Суппорт почесал репу и сказал окей, заполняйте RMA и мы примем решение. Я сказал ждите минуточку, заполнил не отходя от кассы (указал что рад бы чтобы выслали недостающее, возвращать, обменивать — не хочу заморачиваться). Саппорт сказал «уан секонд», и через пару минут, сказал опять окей, мы высылаем вам новую моторку ибо отдельно шайбочек и винтиков не имеем ))) вам какой почтой высылать? Ну я еще опешевший от оперативности не стал наглеть и просить DHL, сказал да шлите любым, лишь бы с трекингом... и в кабинете моем таки появился новый ордер... а когда проснулся утром, уже было письмо с сообщением дескать выслали, вот вам трекинг.
По буквам — китайцы потратили чуть больше 60 баксов, лишь для того чтобы я был с шайбочкой и довольный(!!!)... еще бы я был недовольный, с запасной-то моторкой... ЙАФШОКЕ. И все это — за 10 минут общения в чате саппорта... Респект и уважуха китайцам...
Приехали (с приключениями) 6-ти баночные аккумуляторы для гексы, но с ними я заказал и для квадрика один емкий 4х-баночный аккум. До сих по летал с двумя по 5200 mAh, а сегодня поднялись с одним... но на 16000 mAh. Время активного полета, с щадящим разрядом до 3,8В на банку составило 23 минуты. Это, надо сказать, в ветерок и с тремя подъемами/спусками до 200 метров высоты, при чем из этого времени, минут 8 составили полеты в режиме DRIFT, с максимальными значениями скорости, крена, газа и активными эволюциями. ОООЧЕНЬ хорошо!!! Так что при необходимости и разряда аккумов до минимума — пол-часа полета гарантируются. AUW = 3,5кг
На (опять выдранных из видеоряда) фото наблюдаем городское озеро города Бельцы. Высота — 200 метров, которая оказалась максимально-задаваемой в планировщике TOWER... надо доделывать видео-передатчик и в ручную подняться хотябы на километр 😉
Да... да... да... знаю: «Тебе пора детей воспитывать а не вертолетики строить!» и всетакое... Но имеем что имеем. Или что НЕ имеем, а сути это не меняет. Потому и занимаю свободное время сублимацией в чистом виде — созиданием.
За основу я взял опять продукт компании Tarot — гексу X6, от которой заказал базовые пластины, кронштейны крепления лучей, складывающиеся шасси и мотормаунты (с которыми пролюбился чуток, смотрел на алюминиевые, а почему-то заказал пластиковые 🙁 ну да ладно, для начала сойдет). Дальше пойдет, как у меня водится, и было в первом случае — доработки и изменения конструкции. Но об этом потом. Тапок и «Роджик» (у которого размах лучей, на секундочку 860мм!) даны для масштаба, если честно я офигел когда впервые взял в руки центральные пластины. :)))
Ниже разложенные квад и гекса для сравнения размеров. На гексе приложенны пропеллеры от квада, на 18", а будут 20-22" на удлиненных лучах. И скорее всего, на других маунтах. Эти останутся в качестве запчастей.
Проектный полетный вес (AUW) без навесного оборудования — в пределах 7 килограмм. С возможностью поднять дополнительный вес до 8 килограмм.
Мы решили назвать коптер — Роджиком, из-за дерзкой наклейки Jolly Rogers на карбоновом колпаке. РОДЖИКОМ, замечу, а не «Витядроном», как обозвали некоторые! Ну а поскольку солнце радовало и на улице и в машине рядом — решили полетать )) Сегодня — на карьере возле города.
Опять-же, все фото кликабельные:
А вот такой кадр, вообще кажется Мальдивами, нет?
Сегодня был первый мини-крэш с переворачиванием вверх тормашками. Когда я по ошибке вместо переключения на Loiter перещелкнул на RTL и он стоя почти на шасси дернулся в сторону «дома». Хорошо обороты не большие, пропеллеры 18" карбона выдержали.
Даже стойка GPS хоть и пострадала чуток, стойко выдержала последствия. Стряхнули грязь с пропеллеров, и Роджик полетел также задорно как и раньше )) Хороший дрончик ))
PS: сегодня отлетал 20 минут до 45% заряда (не хотел дома заряжать обратно батареи до режима хранения, и разрядил ровно до 3,8В на банку). Вааааще отлично!