


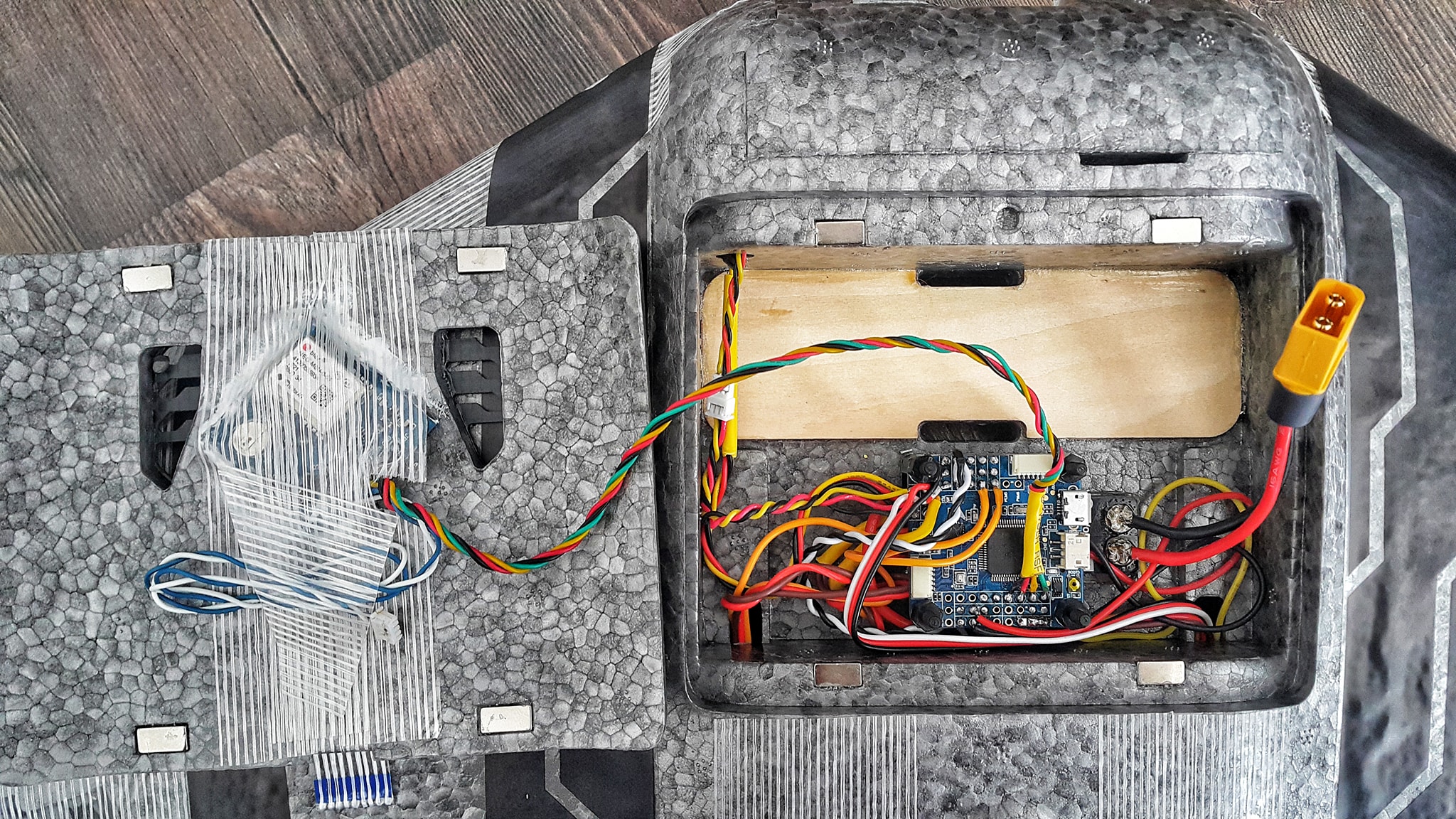
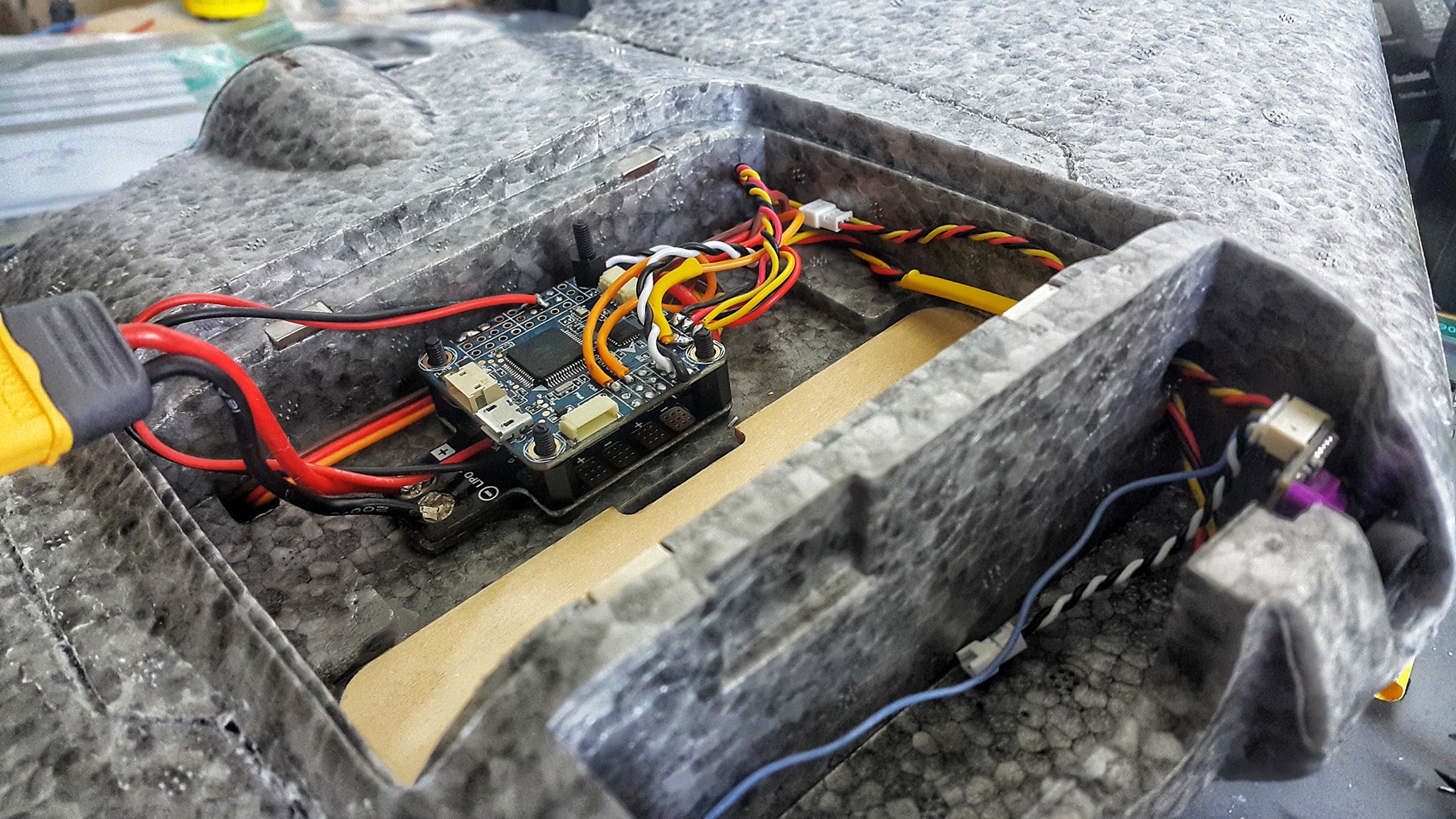
«Рептилия» собрана. Конечно я захотел чтобы она была умная, посему решил поставить мозг — Omnibus F4 pro v3, вторым этажом, над PDB от Matek, что валялись у меня без дела ![]() GPS — пока с неподключенным компасом, ибо айнав умеет понимать куда поворачивать и без него, а то калибровать компас рядом с магнитами крышки — тот еще цирк был бы. Камера — давно валялась Runcam Micro Sparrow 2, ибо та что шла в комплекте с рептилией — фигня полная. Видеопередатчик — хз какой))) что был в коробке. Фигня какая-то, но мне для первых полетов — сойдет. Всеравно эту зверушку пока не планирую отпускать вдаль. Приемник РУ — Frsky XSR+. Осталось настроить iNav и скрестив пальцы, запустить зверушку в небо.
GPS — пока с неподключенным компасом, ибо айнав умеет понимать куда поворачивать и без него, а то калибровать компас рядом с магнитами крышки — тот еще цирк был бы. Камера — давно валялась Runcam Micro Sparrow 2, ибо та что шла в комплекте с рептилией — фигня полная. Видеопередатчик — хз какой))) что был в коробке. Фигня какая-то, но мне для первых полетов — сойдет. Всеравно эту зверушку пока не планирую отпускать вдаль. Приемник РУ — Frsky XSR+. Осталось настроить iNav и скрестив пальцы, запустить зверушку в небо.


Немного страшновато... с коптерами — привычно, если не умеешь удерживать в акро — включаешь position hold и он висит. А эта зверушка, если полетит, стоять на месте не будет... видимо надо бы с ДДТ-шниками пойти и попросить пару уроков управления самолетом)))... да и я немного перестраховался — управление рептилией будет контролировать все-таки iNav. Со всеми плюшками вроде «помошника запуска — autolaunch» и RTL (возврат домой)... так что все может быть не так уж страшно... наверное))))