Так как погода в субботу была замечательная, решил запустить зверушку в небо. И поскольку монтировать в Premiere меня пока не научили, повыдирал из видео немного картинок чтобы показать виды ранней весны под Бельцами )
Все фото кликабельны:





Немного себяшек:



И немного, пускай не высшего, но пилотажа. Режим DRIFT, максимальные ускорения, скорость и углы наклона. На фото специально выдирал места где видно как сильно наклонен коптер, при том что подвес выдерживает и угол и уровень и позицию!! На последнем фото — подвес уперся в свое ограничение ибо я совсем уж сильно и резко разворачилвал его на полном газе:



Надо сказать что я очень доволен тем, как себя ведет зверёк. Послушный и умный — особенно когда летает по точкам и заданной с планшета программе.
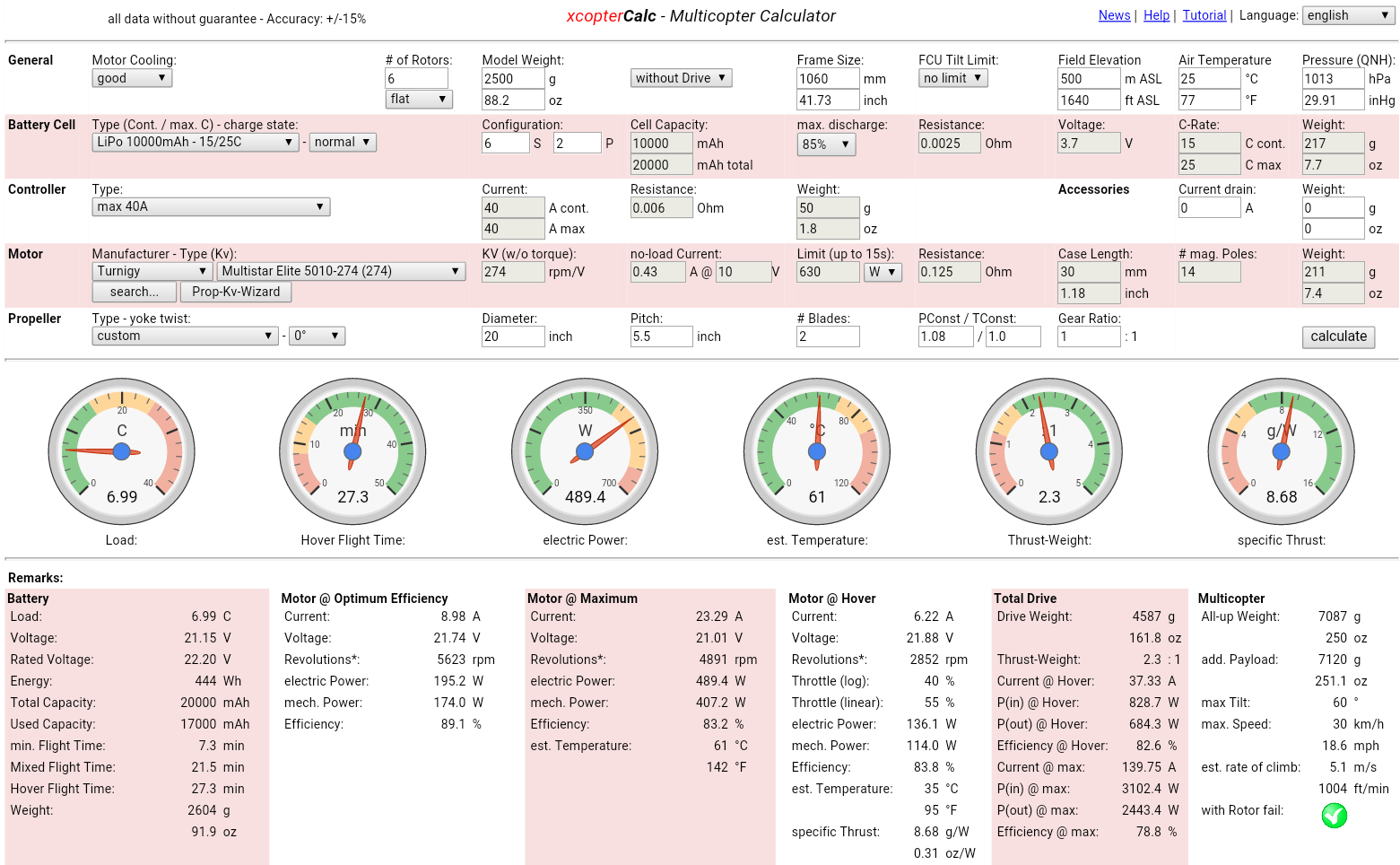
Особенно порадовало полетное время. По слитым дома логам — 28 минут активного полета до момента включения фэйлсэйфа по питанию и +полторы минуты на автоматический полет «домой» и посадку. Это на ОДНОМ заряде батарей (2x 5200mah 4S Multistar) Полный полетный вес (AUW) c гопро, подвесом, и доп аккумом для него — 3200 гр. Я считаю это просто отменным результатом при том что eCalc мне даввал не больше 17 минут активного полета и 22 минуты висения... При том что он еще стоял на земле включенным, пока я тыкался в планшете задавая полетные программы. Думаю, неспешных пролетов строго по программе и без «пилотажа», да и в неветренную погоду — может набраться 30 минут влегкую!
Не обошлось, правдв без мелких жертв — минус одна карбоновая трубка шасси от жесткой посадки на автоматике (батареи под конец сильно просели по напряжению — надо будет поднять чуток лимит резерва емкости аккума)... что дает мне железные и грантированные 25 минут активного и полезного полета на одном заряде! При том, что порывы ветерка все-же имели место быть, что тоже жрет активно аккумулято... Ай лайк ит )))
Ну и напоследок, треки полета в Google Earth, выдранные из логов: