Идея собрать/построить мультикоптер ворочается в голове давно. Регулярно приходят обострения. И тогда теряюсь по вечерам на форумах по авиамоделизму. Толи в детстве рано бросил авиа-кружок в пользу радио-кружка, то-ли… )) Но назревает однозначно новое хобби. )))) Постараюсь писать посты о прогрессе понятно и для тех кто не в теме, но хотел бы ))))) так что эти публикации потенциально «опасны» ) я предупредил) ))
Идея собрать/построить мультикоптер ворочается в голове давно. Регулярно приходят обострения. И тогда теряюсь по вечерам на форумах по авиамоделизму. Толи в детстве рано бросил авиа-кружок в пользу радио-кружка, то-ли… )) Но назревает однозначно новое хобби. )))) Постараюсь писать посты о прогрессе понятно и для тех кто не в теме, но хотел бы ))))) так что эти публикации потенциально «опасны» ) я предупредил) ))
И еще… все что ниже, это ИМХО. Имейте в виду.
Применений для него (помимо того, что это просто клевая игрушка) у меня имеется достаточное количество чтобы желание его-таки построить не угасло.
- 3D Картография интересных мест
- FPV, в угоду давней детской мечты – летать
- Видео-сьемка для друзей операторов
- и одна зреющая идея для фотографии, но об этом в свое время.
- …
Обзавестись коптером можно разными путями. Можно просто купить нормальный, готовый, вроде DJI Phantom или еще более крутого DJI Inspire 1, но бюджет будет от 1500 USD и выше. Можно купить китайский, за три копейки, разбить и забыть, но это тоже не то что хочется. А можно почитать форумы, рассчитать правильный и собрать вполне бюджетно и в разы с более широкими возможностями чем у готового. Первый и второй вариант – не интересуют принципиально. А вот ПОСТРОИТЬ самому – это мне реально интересно! Особенно сейчас, когда великий китайский народ освоил и довел до уровня производство комплектующих для сего дела. Но за меньшие денежные затраты все-равно надо будет заплатить. Своим временем. И возможно не одним разбитым пропеллером, штангой или шасси. Но если вам, как и мне очень нравится процесс постройки – это вас не остановит.
Постройка мультикоптера начинается с теории и специализированных форумов. Самые интересные с точки зрения полезной информации это www.rcgroups.com, diydrones.com, forum.rcdesign.ru и немного multicopter.ru/forum с multirotorforums.com. В каждом есть рубрикатор и особенно для новичков – выжимки, FAQи и справочная информация. На этих форумах я провел не одну ночь с планшетом на пузе. Тут и логи постройки, и пузомерки, и куча теории и математических выкладок…
Когда насыщаемся теорией, начинаем считать свою конфигурацию. Лучший (если не единственный популярный) калькулятор на сегодня – это www.ecalc.ch. В бесплатном варианте его использования, он не дает полный список доступных компонентов, но перегрузив несколько раз списки (он каждый раз подгружает новый набор компонентов, просто выберите другого производителя, потом опять интересующий и у вас будет новый список) вы найдете в нем любой интересующий вас компонент.
Про комплектующие отдельно. Во-первых мекка коптеростроителя-шопоголика это www.hobbyking.com. Тут (ну практически) все — без претензий на элитность. Еще несколько, такого же класса — rctimer.com, www.goodluckbuy.com, www.omgfly.com, www.foxtechfpv.com, www.banggood.com, www.hobby-wing.com. У всех остальных все в той или иной степени дороже.
Во-вторых, сразу после требуемых характеристик детали, вас должен интересовать – её вес. Это чуть ли не главный критерий влияющий на полетное время. Так что здесь, без построек «с запасом» — любую деталь выбираем с минимально требуемыми характеристиками. Даже сечение проводов подбираем не на глаз, а под тот ток который будет ими проводится. И не больше.
Теперь про каждый компонент в отдельности:
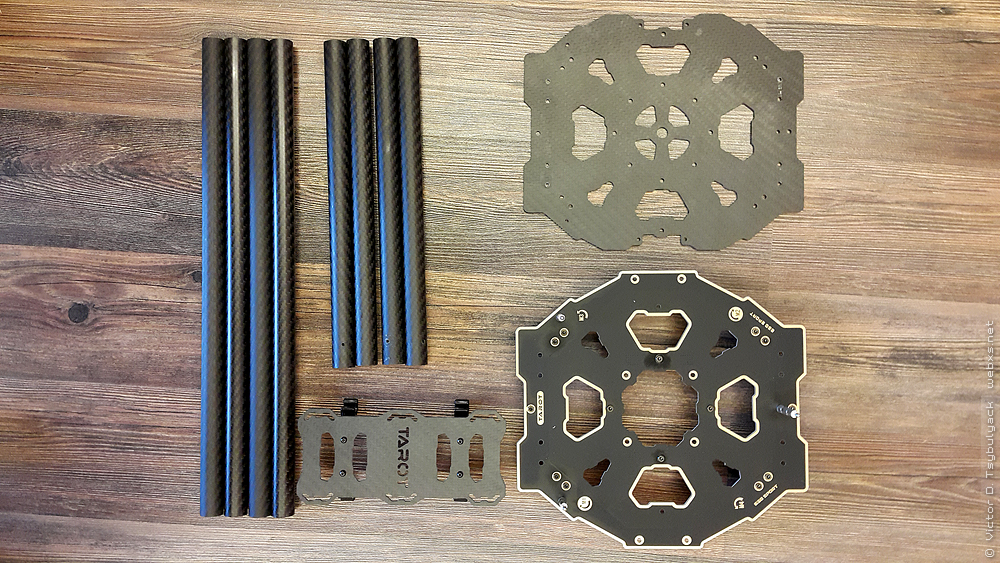
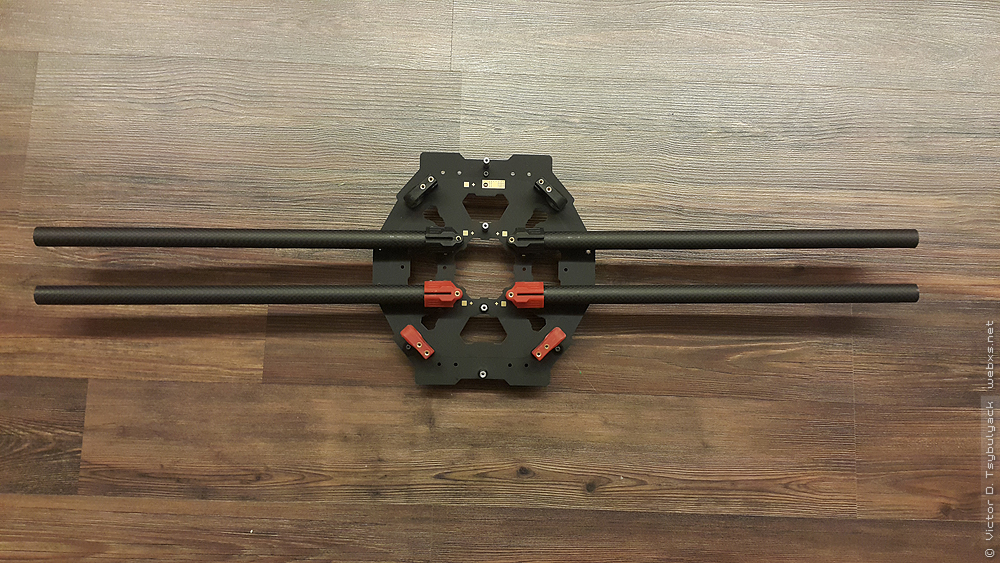
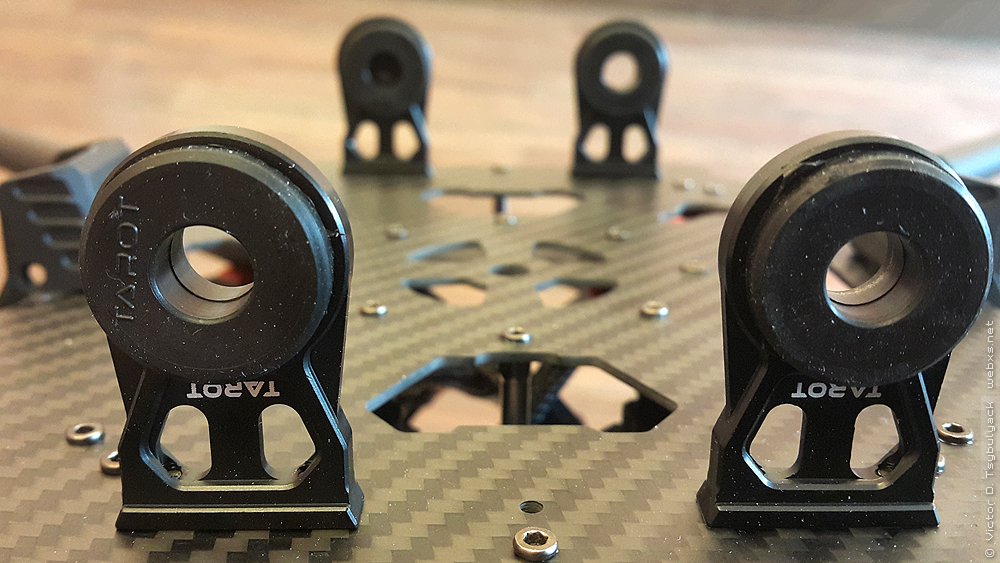
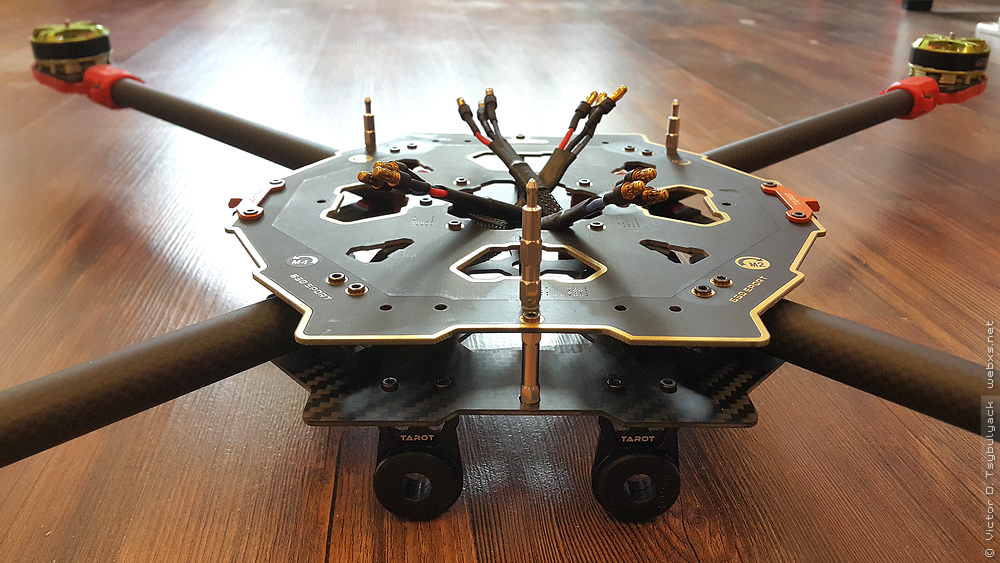
- Рама. Карбон. Это самый легкий и крепкий материал доступный для строительства коптеров. Есть готовые наборы, есть просто трубки, пластины, маунты. По-моему, лучше всего взять за основу готовый набор от TAROT или DJI, внимательно рассмотреть его, а купить просто отдельные компоненты. Получится дешевле и без ненужных вам деталей. Штанги брать запасные сразу.
- Пропеллеры. Тоже карбон. Нынче он дешев. Брать про запас.
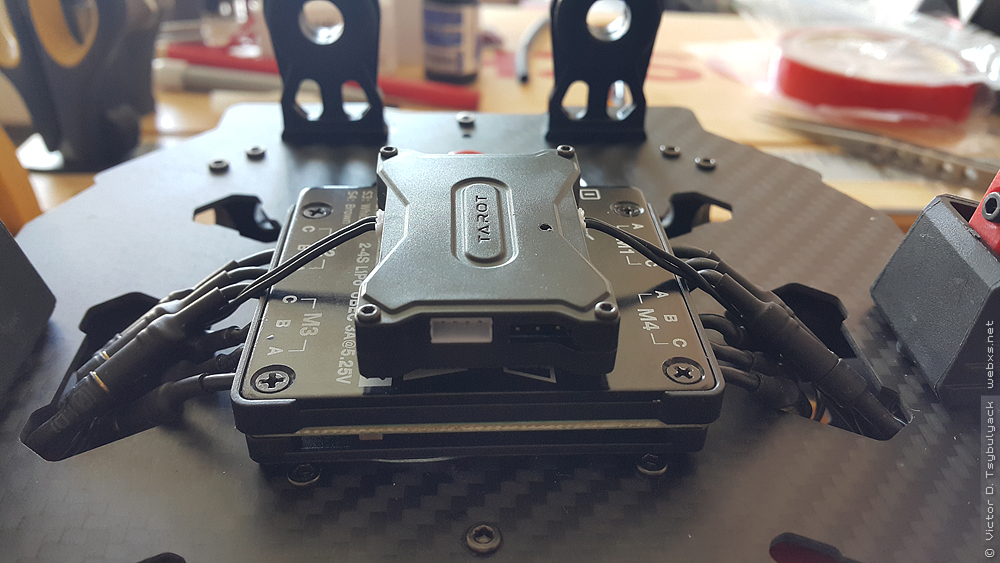
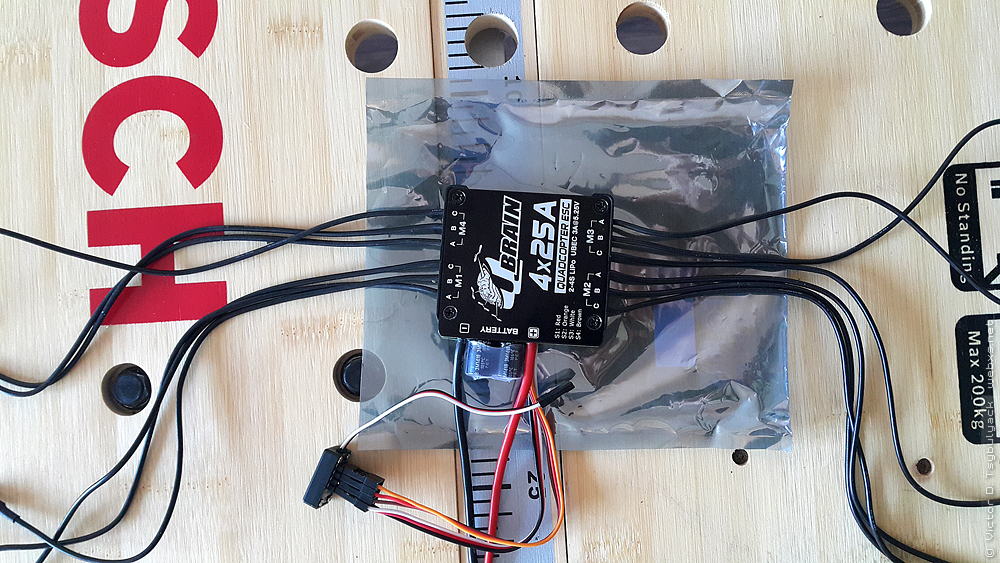
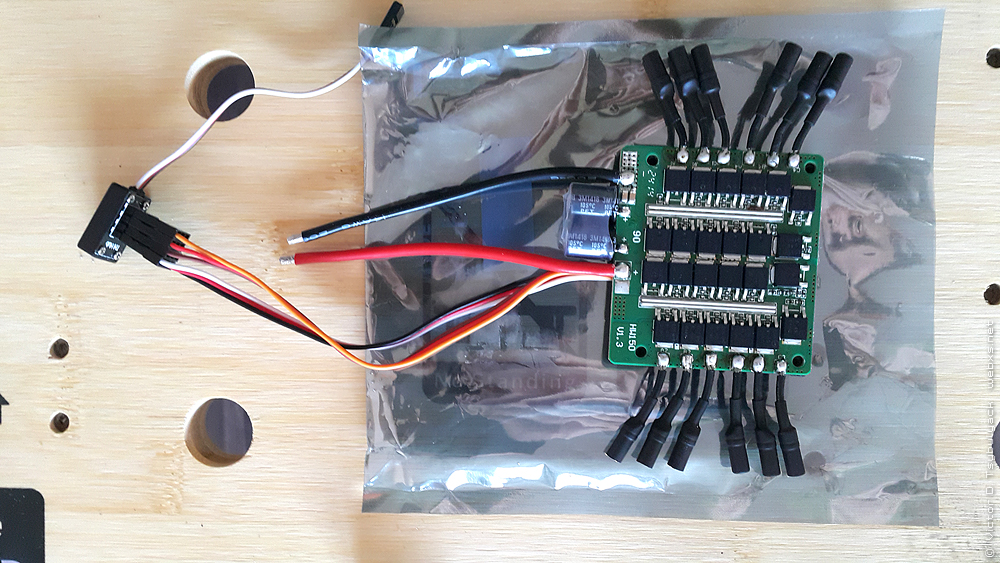
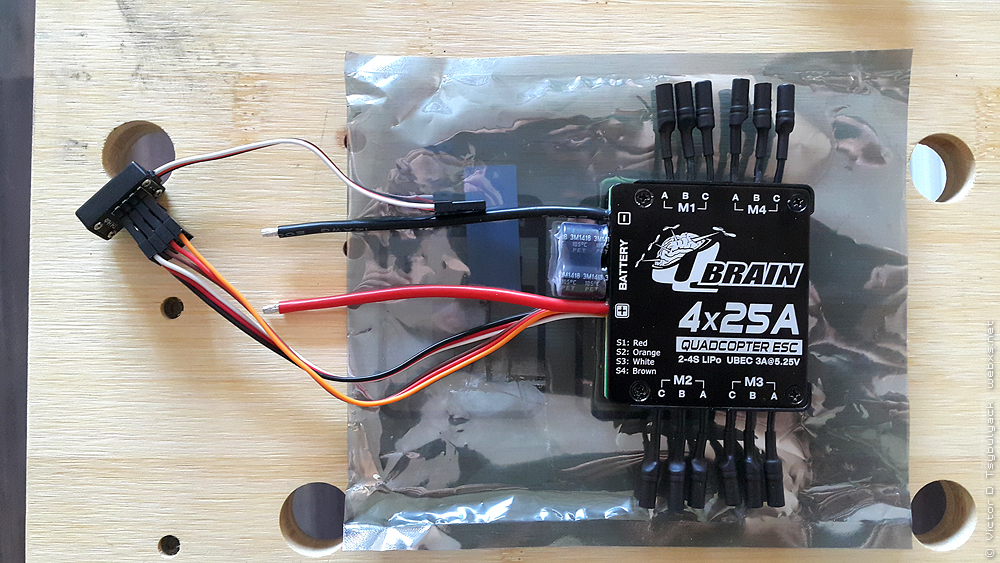
- ESC (регуляторы). Сколько двигателей, столько регулей. Берите на ток больше чем пиковый потребляемый мотором. Это исключение. Берите версии OPTO, без встроенного BEC, чуть сэкономите ток и вес.
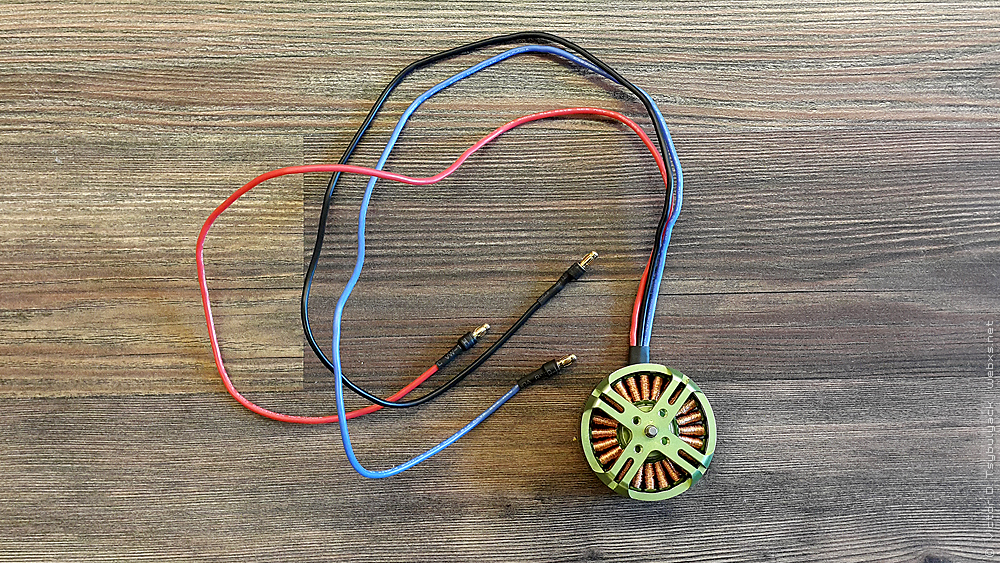
- Моторы. Не гоняйтесь за элитой типа T-Motor. Да, хорошие, но не за их цену. Очень удачные и мне интересные это серия Multistar от Turnigy – это двигатели разработанные именно для коптеров.
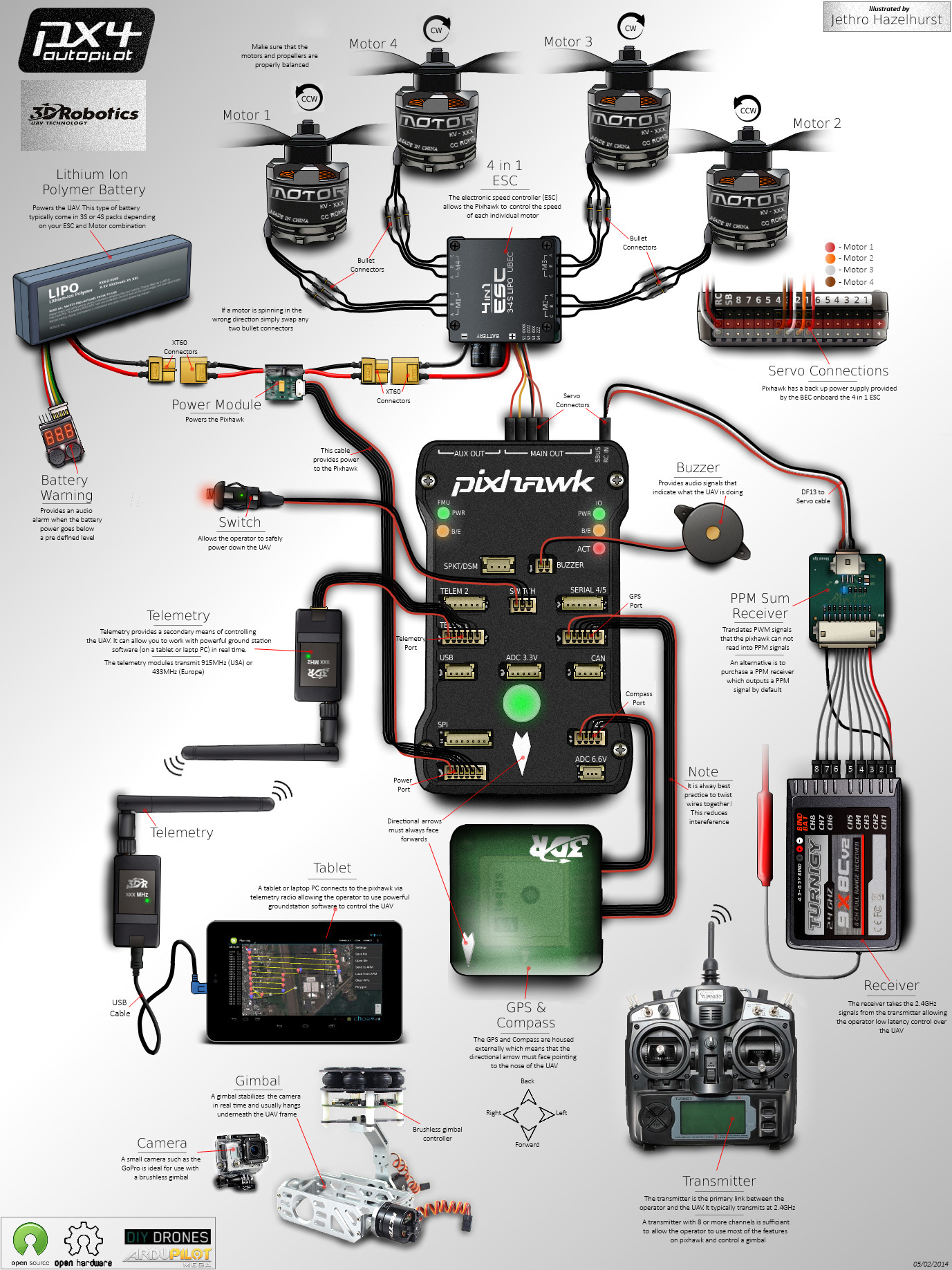
- Контроллер. Вообще – это тема для отдельной дискуссии, а тут скажу, что есть дорогие, хорошие, типа DJI Naza/Wookong/A2, но закрытые, есть дешевые, но бесполезные и есть платформа ardupilot (или APM). Это открытая платформа на базе adruino, с открытым кодом и доступными модулями-железками. По мне – самая интересная, ибо можно нафаршировать любыми модулями, возможностями и фичами совершенно бесплатно, в отличии от желания получить то же самое от DJI.
- Радио-аппаратура. Минимум 6 каналов. Тоже не вижу особого смысла гоняться за брендами типа FUTABA (хоть это и не не самая дорогая!) когда есть FrSky, Turnigy.
- Батареи. Ессно LiPo, на данный момент (хоть есть и умельцы собирающие банки из литиевых банок Панасоника) Обратите внимание не ток разряда – он должен быть достаточным по подсчетам из кальклятора. И имейте ввиду что производители лукавят, так что значение написанное на батарее – есть смысл делить на двое ) Брать батареи с сильно большим током разряда – тоже нет смысла ибо будут тяжелее. А тут САМОЕ ГЛАВНОЕ – ВЕС.
- (опционально и можно не сразу) Телеметрия, подвесы, FPV, OSD… дальше только ваша фантазия и бюджет сможет вас ограничить.
Это была ознакомительная статья. В следующих публикациях на эту тему, буду стараться держать вас в курсе дела постройки моего собственного дрона.