В наше время уже без компьютера — никак. В коптере прошивается — ВСЁ. И модуль GPS, и телеметрийный модуль, и OSD не говоря уже про сам мозг. Даже аппаратура радио-управления и та прошивается! (хотя чего ворчать, это я осознанно пошел по пути сборки из опен-сурса всего, бывает ессно и все готовое, но это не наш метод =))
Ссылки которые понадобятся: Mission Planner, OpenTx и Zadig driver. Последний нужен даже несмотря на то что винда найдет драйвер при подкючении радио-аппы. Без него не прошьетесь.
 Mission Planner — среда для работы с мозгом. Подключаем все на столе, не забываем воткнуть микро-сд карточку в PixHawk, так-же и динамик и кнопку. Желательно также и внешний компас и GPS — и тут надо сделать еще следующее: пришпилить внешний модуль GPS/компаса к мозгу физически, можно для этого использовать картонку как я чтобы компас внешнего модуля и встроенный смотрели в одну сторону. Иначе при калибровке будет цирк =) Хотя все-равно после установки всего этого хозяйства на коптер, надо будет заново клибровать, ибо умный мозг проставит оффсеты какие увидит при калибровке, а они на реальном кваде и на картоке будут разными ))
Mission Planner — среда для работы с мозгом. Подключаем все на столе, не забываем воткнуть микро-сд карточку в PixHawk, так-же и динамик и кнопку. Желательно также и внешний компас и GPS — и тут надо сделать еще следующее: пришпилить внешний модуль GPS/компаса к мозгу физически, можно для этого использовать картонку как я чтобы компас внешнего модуля и встроенный смотрели в одну сторону. Иначе при калибровке будет цирк =) Хотя все-равно после установки всего этого хозяйства на коптер, надо будет заново клибровать, ибо умный мозг проставит оффсеты какие увидит при калибровке, а они на реальном кваде и на картоке будут разными ))
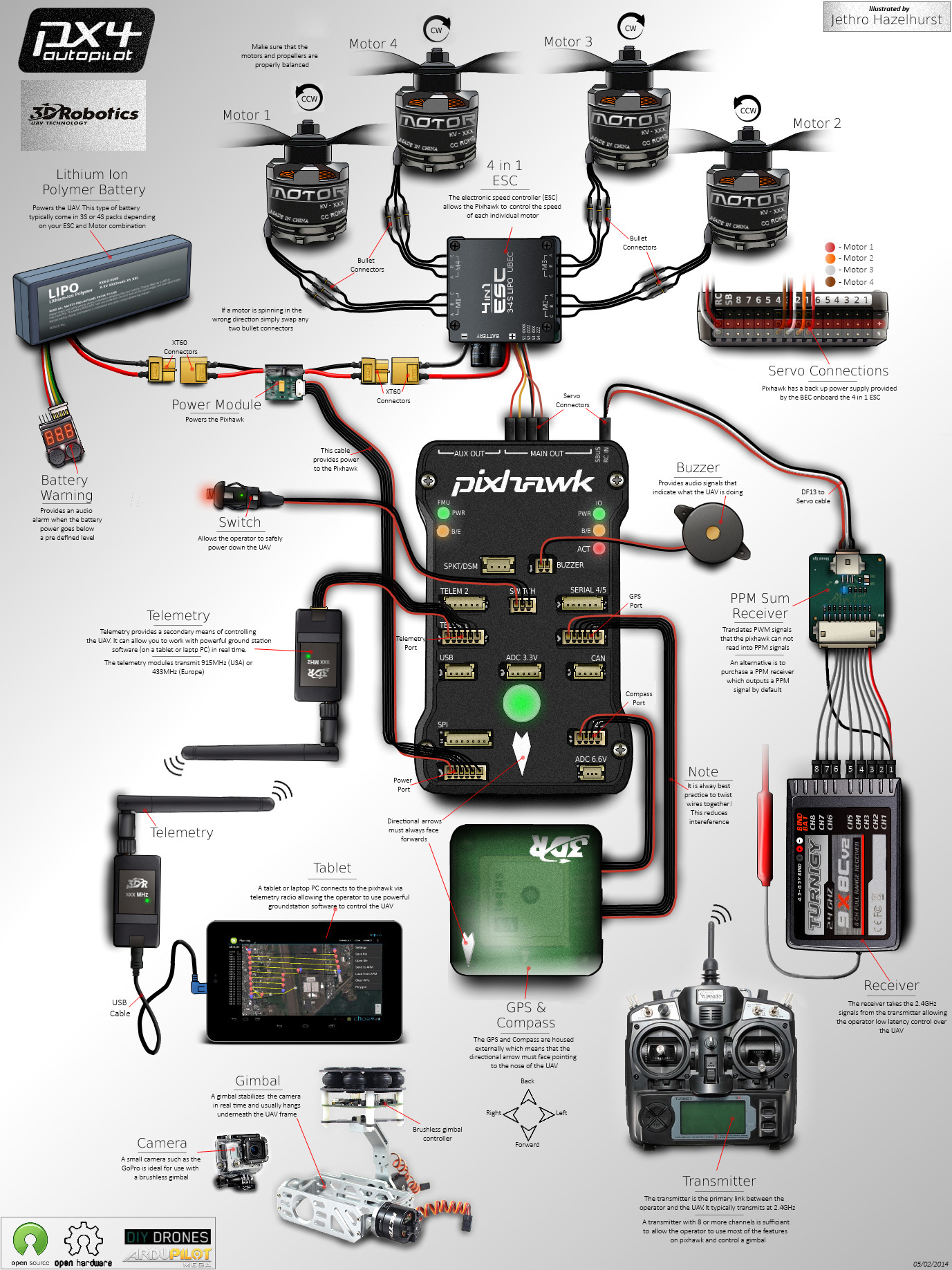
Замечательная и кликабельная картинка с схемой подключения — справа чуть выше:
Дальше все просто — есть куча документации на pixhawk.org и ardupilot.com а также полно видео на YouTube. Главное вначале понять что вы хотите делать, а не тупо повторять. Хотя наверное можно и так )))
После прошивок и танцев с бубнами, в плэннэре видим живую картинку с датчиков, карту, параметры и все лайв! Двигаете мозг — двигается все в программе. Забавненько.
OpenTx — опен-сурсная прошивка для радио-аппы. Можно все настраивать с кнопок, а можно завести на компе OpenTx Comapnion и рулить всем оттуда. Это проще. Есть замечательная статья парня которую надо вкурить и дальше все будет понятно. Если нет — есть его же плейлист с туториалами на Ютупе про эту аппу. Там точно все разжеванно. У него там даже учтен вариант с 6-ти позиционным переключателем который я установил. (таже есть его плейлист про PixHawk)
После всех настроек аппы, можно подключить и забайндить приемник, а в Mission Planner-e калибровать радио-каналы.
Все на самом деле просто как три копейки, даже без туториалов, хотя Гугла более чем достаточно в любом вопросе.